Workshops will take place across two days of the conference on Monday, July 13 (half-day morning events) and Friday, July 17 (half-day morning and afternoon events). Each workshop is organized as a semi-independent event, and has a unique schedule reflecting the planned activities, constraints and preferences of the organizers. Please check the workshop websites for more details on their particular schedules.
All workshops are held at the University of Technology Sydney (UTS) — 15 Broadway, Ultimo NSW 2007 — not at the ICC. The ICC is a 20-minute walk from UTS. Please make your way to UTS on Monday morning.
The map below shows the locations of the three UTS buildings where the RSS workshops will be held.
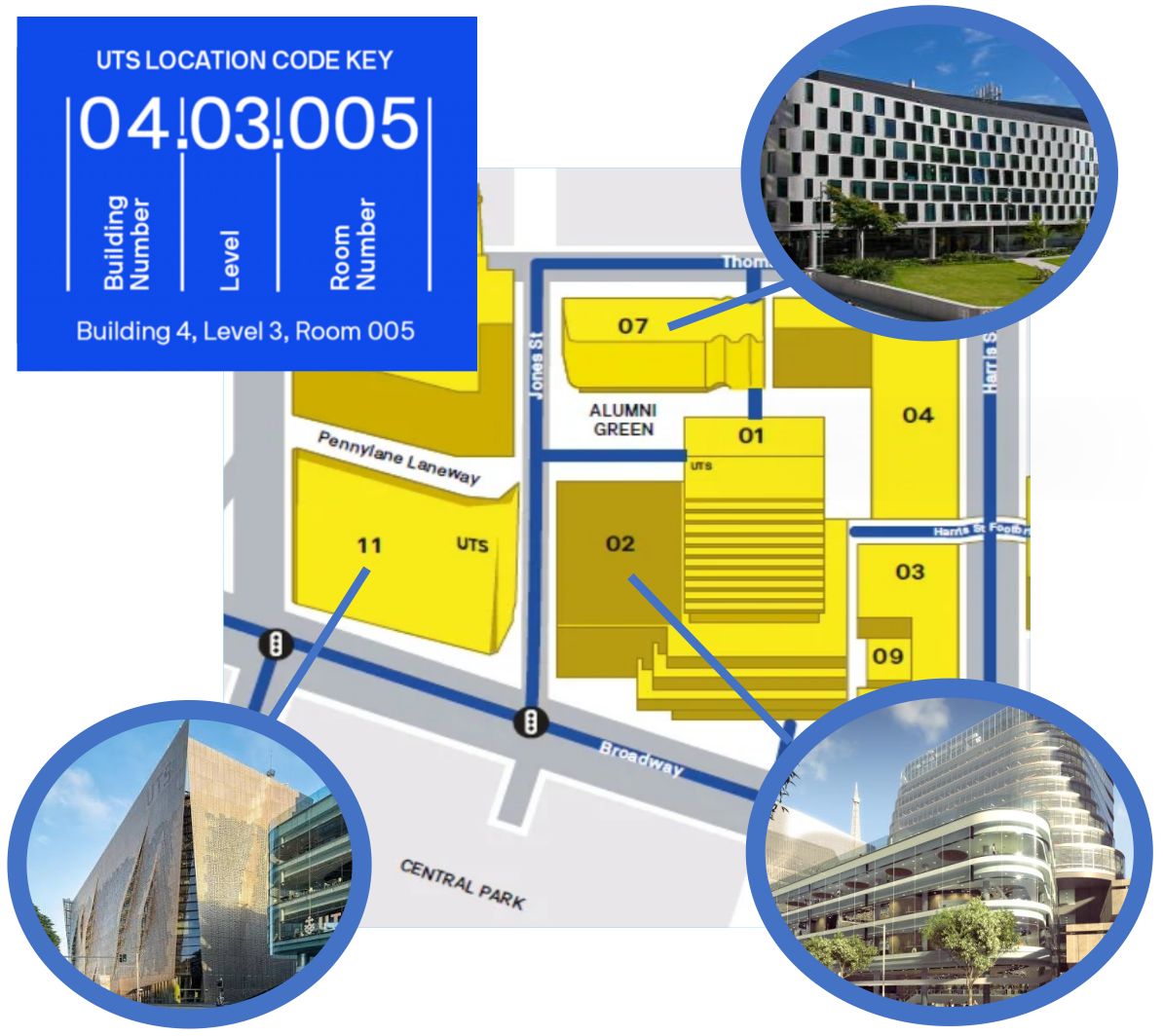
An interactive campus map is also available at maps.uts.edu.au.
The Location column is read as, for example: CB11.B1.101 (Building 11, Level B1, Room 101). There will be volunteers as well as posters on the day helping with directions.
We will continue updating venues for the poster rooms as we get concrete numbers for posters. Poster boards will be available to mount A0 portrait posters.
For amenities and images of the allocated venue, please access the following link. It is a PDF and you can search for your room number. While this is a comprehensive list, we can't change or request new venues — this is just for your further planning: UTS bookable classrooms (PDF).
UTS map: maps.uts.edu.au
| ID | Location | Title | Poster Session Location | Website |
|---|---|---|---|---|
| 1 | CB11.B2.103 | Towards Robust Execution of Long-Horizon Whole-Body Control Tasks | CB11.B2.104 | https://opendrivelab.com/rss2026/workshop |
| 2 | CB11.00.405 | From Perception to Action: Representation-Centric Robot Autonomy | Outside of CB11.00.405 | https://rcba-workshop.github.io/rss2026/ |
| 3 | CB11.B3.103 | Beyond the Lab: Rethinking Methods for Human Behavior Monitoring and Modeling in In-the-Wild Human-Robot Interaction | CB11.B3.104 | https://sites.google.com/view/rss26-beyond-the-lab-hri/home |
| 4 | CB11.03.301 | It’s the demos: A Deep Look at the Role of Demonstration Quality in Imitation-Based Robot Manipulation | Outside of CB11.03.301 | https://its-the-demos.github.io/ |
| 5 | CB11.B2.102 | Bridging AI and Robotics: Towards Safer and Smarter Surgery | CB11.B2.101 | https://sites.google.com/view/ai-and-healthcare-robotics |
| 6 | CB11.B1.101 | Beyond rigidity - Deformable and Articulated Robotic Object Manipulation | Either in CB11.B1.101 or outside of the room. | https://rss2026-beyond-rigidity.github.io/ |
| 7 | CB11.00.401 | Post-training for Robotics Foundation Models | Outside of CB11.00.401 | https://posttraining-for-robotics.github.io/ |
| 8 | CB02.07.150 | 4th Workshop on Dexterous Manipulation: Scalable Learning for Human-Level Skills | Outside of CB02.07.150 | https://dex-manipulation.github.io/rss2026/ |
| 9 | CB11.B3.102 | Rethinking What It Means to be "Safe" for Generalist Robots | CB11.B3.101 | https://sites.google.com/andrew.cmu.edu/rethinking-safety-rss-2026/ |
| 10 | CB11.00.100 | Workshop on Neuromorphic Robotic Systems (NeuRoSys) | Outside of CB11.00.100 | https://sites.google.com/view/neurosys2026 |
| 11 | CB07.02.025 | Whole-body Control and Bimanual Manipulation: Applications in Humanoids and Beyond | CB07.02.020 and CB07.02.015 | https://wcbm-workshop.github.io/rss2026/ |
| ID | Location | Title | Poster Session Location | Website |
|---|---|---|---|---|
| 12 | CB02.07.150 | Data-Centric Robotics: What Data Do Robots Really Need? | Outside of CB02.07.150 | https://rss-workshop-2026.github.io/ |
| 13 | CB11.00.401 | Closing the Sim2Real Gap: Progress and Challenges | Outside of CB11.00.401 | https://sites.google.com/view/rss2026sim2realws/home |
| 14 | CB11.B1.101 | Mapping the Reef: Underwater 3D Reconstruction for Coral Ecosystems | Either in CB11.B1.101 or outside the room | https://alejandrofontan.github.io/Mapping-the-Reef-RSS26/ |
| 15 | CB11.B3.103 | Reason, Plan, Act: A Hands-On Tutorial on Embodied Agentic AI | CB11.B3.104 | https://sites.google.com/monash.edu/reasonplanactahands-ontutorial |
| 16 | CB11.B2.102 | Embodied Intelligence Meets Foundation Models: Tactile Sensing and Soft Manipulation | CB11.B2.101 | https://sites.google.com/openmind.org/intelligence-in-manipulation/home |
| 17 | CB07.02.025 | Open-World Navigation in the Foundation Model Era: Robustness and Failure Recovery | CB07.02.020 and CB07.02.015 | https://adacompnus.github.io/open-world-navigation-26/ |
| 18 | CB11.00.405 | Robot World Models | Outside of CB11.00.405 | http://robot-worldmodels.github.io |
| 19 | CB11.B2.103 | Robot Planning in the Era of Foundation Models (FM4RoboPlan) | CB11.B2.104 | https://sites.google.com/alumni.brown.edu/fm4roboplan26/ |
| 20 | CB11.B3.102 | 3rd Workshop on Semantic Reasoning and Goal Understanding in Robotics (RSS SemRob 2026) | CB11.B3.101 | https://semrob.github.io/ |
| 21 | CB11.00.100 | Trustworthy Embodied Foundation Models: Safety by Design versus Safety by Practice | Outside of CB11.00.100 | https://robot-fm-safety.github.io/ |
| 22 | CB11.03.301 | Embodied4Arts: Robots as Creative Partners for Artistic, Expressive, and Craft Tasks | Outside of CB11.03.301 | https://embodied4arts.github.io |
| ID | Location | Title | Poster Session Location | Website |
|---|---|---|---|---|
| 23 | CB11.B2.102 | Tactile Sensing for Robotic Foundation Models | CB11.B2.101 | https://tac-for-fm.github.io/rss2026/ |
| 24 | CB07.02.025 | Diffusion for Robot Learning | CB07.02.020 and CB07.02.015 | https://rss2026-diffusion-robot-learning.github.io/ |
| 25 | CB11.03.301 | From Imitation to Certification: Learning, Reasoning, and Formal Methods for Safe Robot Manipulation | Outside of CB11.03.301 | https://sites.google.com/nyu.edu/imitation2certification-wsrss2/home |
| 26 | CB11.B1.101 | Sampling-Based Optimization for Robotics | Either in CB11.B1.101 or outside of the room. | https://sites.google.com/view/sampling-workshop |
| 27 | CB11.B3.103 | The Geometry of Motion: Physics-Informed Structures for Learning and Control | CB11.B3.104 | https://sites.google.com/view/rss26-geometry/home |
| 28 | CB11.00.405 | Reinforcement Learning for Vision-Language-Action Models (RL4VLA) | Outside of CB11.00.405 | https://sites.google.com/view/rl4vla-workshop/home |
| 29 | CB11.04.400 | Human-centric Mobile Manipulation Workshop | CB11.04.400 | https://adacompnus.github.io/human-centric-mobile-manipulation/ |
| 30 | CB11.B3.102 | Lab-to-Production Workshop: Toward Industrial-Grade Perception and Manipulation | CB11.B3.101 | https://robotics-workshop.github.io/l2p-rss26/ |
| 31 | CB11.B2.103 | Planning and Control with Imperfect Sensors and Perception | CB11.B2.104 | https://ariasystems.group/workshops/planning-perception.html |
| 32 | CB11.00.401 | Failure Is Not the End: Towards Open-World Failure Recovery for Robots | Outside of CB11.00.401 | https://csiro-robotics.github.io/failure-recovery/ |